Gyroskop-Regelung im Roboter
Erklärung der Gyroskop-Regelung im Roboter
1. Ziel der Regelung
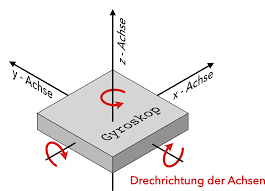
Das Gyroskop misst kontinuierlich die Drehgeschwindigkeit um die Z-Achse des Roboters. Unser Ziel ist es, den Roboter auf einem gewünschten Winkel (z. B. geradeaus) zu halten, auch wenn äußere Kräfte (z. B. Bodenunebenheiten) versuchen, ihn davon abzubringen.
2. Sensorik
Das Gyroskop (LSM6DS3) liefert Winkelgeschwindigkeiten in Grad/Sekunde. Durch Integration dieser Geschwindigkeit über die Zeit angle += gyro_z * dt erhält man den aktuellen Kurswinkel.
 |
 |
 |
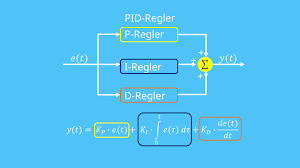
3. PID-Regelung
Der Roboter verwendet eine PID-Regelung (Proportional-Integral-Derivative), um die Abweichung vom Sollwinkel zu korrigieren:
- P-Anteil: reagiert direkt auf den Fehler (Ist - Soll)
- I-Anteil: summiert Fehler über die Zeit (gegen dauerhafte Abweichung)
- D-Anteil: berücksichtigt die Änderungsrate des Fehlers (für Dämpfung)
Die Korrektur wird wie folgt berechnet:
correction = Kp * error + Ki * integral + Kd * derivative
4. Motorsteuerung
Die berechnete correction wird direkt auf die linke und rechte Motorleistung angewendet:
left = speed + correction right = speed - correction
So wird der Roboter aktiv auf Kurs gehalten: weicht er ab, kompensieren die Motoren die Differenz. Das erfolgt 100-mal pro Sekunde (10 ms Takt).
5. Ergebnis
Der Roboter kann über eine Strecke konstant geradeaus fahren – auch wenn das Gelände leicht schief ist oder einseitiger Widerstand besteht. Die Kursregelung erfolgt in Echtzeit im Millisekundentakt.
Der PID-Regler reagiert flexibel auf Abweichungen, sorgt für ruhigen Lauf und stoppt automatisch, wenn ein Hindernis erkannt wird (per Echo-Sensor).
6. Erweiterungsidee
Künftig kann der Roboter auch in Kurven fahren, indem der target_angle während der Fahrt dynamisch angepasst wird. Auch ein zweiter Sensor für Seitenabweichungen wäre denkbar.